塘口乡步进式BH180A-L1-10-B1-D1-S8机械手行星减速箱
文章来源:ymcdkj
发布时间:2024-05-06 11:57:44
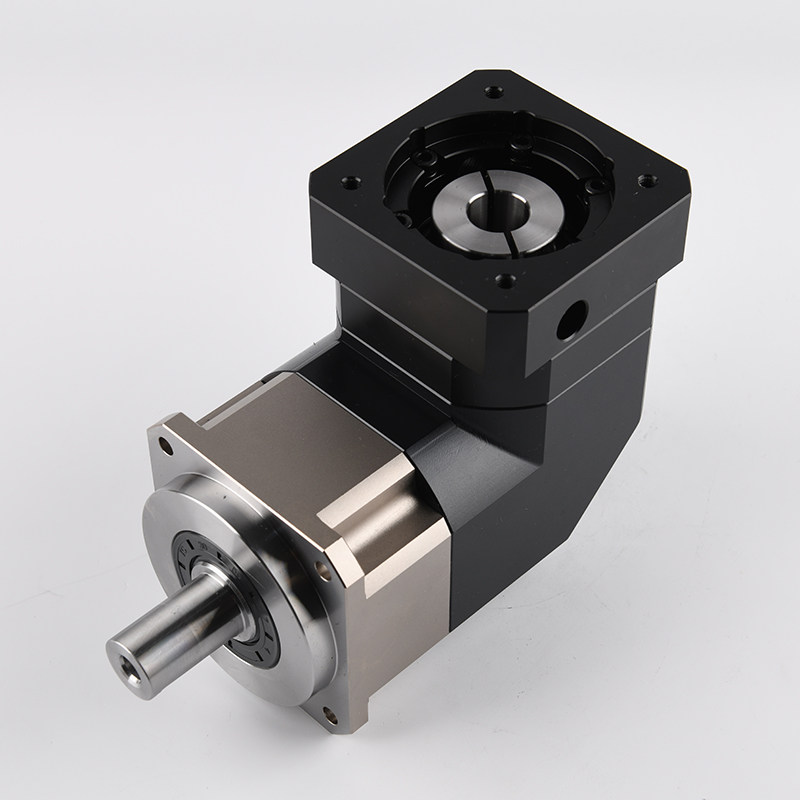
塘口乡:步进式BH180A-L1-10-B1-D1-S8机械手行星减速箱
铝熔体易于吸收 ,且随温度与状态的变化,平衡吸氢量变化很大,高温一次电解铝液,在95℃时的平衡吸氢量为2。l/1gAL,75℃为1。l/1g/AL。℃熔点的液态铝中平衡吸氢量力.69ml/1gAL,而在此温度结晶后的固态铝则为。36mL/1gAL,即二者相差近2倍。由此说明,连铸时在结晶凝固界面附近的铝熔体中会出现 的浓化,其分压,足以成核形成气泡。
行星齿轮减速机工作原理:
1)齿圈固定,太阳轮主动,行星架被动。 此种组合为降速传动,通常传动比一般为2.5~5,转向相同。
2)齿圈固定,行星架主动,太阳轮被动。此种组合为升速传动,传动比一般为0.2~0.4,转向相同。
3)太阳轮固定,齿圈主动,行星架被动。此种组 向相同。
4)太阳轮固定,行星架主动,齿圈被动。此种组合为升速传动,传动比一般为0.6~0.8,转向相同。
5)行星架固定,太阳轮主动,齿圈被动。传动比一般为1.5~4,转向相反。
6)行星架固定,齿圈主动,太阳轮被动。此种组合为升速传动,传动比一般为0.25~0.67,转向相反。
7)把三元件中任意两元件结合为一体的情况:当把行星架和齿圈结合为一体作为主动件,太阳轮为被动件或者把太阳轮和行星架结合为一体作为主动件,齿圈作为被动件的运动情况。行星齿轮间没有相对运动,作为一个整体运转,传动比为1,转向相同。汽车上常用此种组合方式组成直接档。
8)三元件中任一元件为主动,其余的两元件自由:从分析中可知,其余两元件无确定的转速输出。
精密减速机在伺服控制中起的作用
在机械运动控制的中,精密齿轮减速机是一个机械能的转换环节,电机的转矩经精密齿轮减速机后得以放大,转速得以降低,反之,负载的转动惯量经精密齿轮减速机耦合到电机上,得以减小。
我们知道,理想的情况是传递过程功率守恒,但实际总是有损耗,设传递过程的效率是η,那么:/η=
又因为减速比i=/ =/ i(B-1)
所以=iη(B-2)
——电机力矩(NM),——载荷力矩(NM),
,——电机,载荷角速度(弧度/s)
我们再来看一下齿轮减速器对转动惯量的作用,由能量不灭的基本原理,在传动链中,同一时刻的储能相等:
从而得出:
Jem-——折算到电机轴上的等效转动惯量(kgm2)
JL——载荷转动惯量(kgm2)
从上述推演可看出,平时我们很熟悉的关于齿轮箱的公式,都是源自物理学的能量守恒定理。
上述的(1)—(3)表示了减速机的三个基本功能:
1. 降低伺服电机的转速( =/ i)
伺服电机的额度功率一般体现在转速1000rpm到6000rpm之间,甚至高达10000rpm以上,实际使用过程中很少使用到如此高的转速,同时为了充分利用电机的额定功率,所以需要通过合适减速比的减速机来获得需要的工作转速。
2. 转矩放大(=iη)
在电机输入给减速机的功率一定的情况下,由于减速机输出速度的降低,必然会获得更大的输出转矩。很多情况下这也是选用减速机的一个重要理由。
3. 匹配负载转动惯量()
伺服电机的惯量是比较小的,一般来说折算到伺服电机本身的负载惯量不能超过伺服电机本身惯量的4倍(不同品牌伺服电机的设计有很具体的数据),而实际应用中的负载有很多种,如果负载的惯量与电机能接受的惯量相差太远,就会大大降低伺服电机的响应速度,从而影响生产效率和增大动态误差。而减速机就能起到匹配惯量的关键作用。
2、温升是伺服减速机与环境的温度差,是由伺服减速机发热引起的。温升是伺服减速机设计及运行中的一项重要指标,标志着伺服减速机的发热程度,在运行中,如伺服减速机温升突然增大,说明伺服减速机有故障,或风道阻塞或负荷太重;
3、运行中的伺服减速机铁芯处在交变磁场中会产生铁损,绕组通电后会产生铜损,还有其它杂散损耗等。这些都会使伺服减速机温度升高。另一方面伺服减速机也会散热。当发热与散热相等时即达到平衡状态,温度不再上升而稳定在一个水平上。当发热增加或散热减少时就会破坏平衡, 使温度继续上升,扩大温差,则增加散热,在另一个较高的温度下达到新的平衡。
+
-100-S2-P2 00-S2-P2
上一篇:沥青瓦专用沥青胶